Emmet Friel cyber security blog
Building a Lightweight 10MB Embedded Linux OS on a Beaglebone Black ARM Cortex-A8
Introduction
This project was built on a Ubuntu 18.04.3 LTS VM w/ 4GB RAM and 2 cores.
This tutorial will show you how to build the latest (now as of writing) 5.5.5 kernel on the Beaglebone Black with a root filesystem that is less than 10MB which can be easily ported to other boards and IOT devices. The tutorial will consist of using crosstool-NG to build the toolchain, using Make to build the bootloader, kernel and device trees and lastly using Buildroot to compile the root filesystem. Building an embedded Linux distribution from scratch requires four main elements:
- Toolchain
- A set of tools required to build and compile your source code that will be able to run on the target device. The tools include a compiler, a linker and various run-time libraries. I will be using a cross-compilation toolchain that will compile the code on my host (Ubuntu 18 VM) that then will run on the target (BeagleBone Black).
- Bootloader
- This initializes the system and loads the kernel into memory. The ability to hand off control to the kernel is achieved through device trees, a data structure (hierarchical nodes which resembles a tree) that defines the hardware.
- Kernel
- The heart of the operating system. It is responsible for managing resources, interfacing with hardware and it provides an API that allows users to interact with the kernel space from the user space such as shell terminal for example.
- Root filesystem
- The final element which provides the kernel with the required libraries and program that will be run after kernel initialization. The kernel will either mount the root filesystem in RAM, known as an initial RAM filesystem (initramfs), from the bootloader or it will mount it from a block device such as an SD card or it can be mounted over the network (NFS – Network Filesystem).
- The final element which provides the kernel with the required libraries and program that will be run after kernel initialization. The kernel will either mount the root filesystem in RAM, known as an initial RAM filesystem (initramfs), from the bootloader or it will mount it from a block device such as an SD card or it can be mounted over the network (NFS – Network Filesystem).
1. Toolchain: crosstool-NG
Four major components of a toolchain:
-
GNU Compiler Collection (GCC) – A collection of compilers used to convert the C/C++/Java etc. into assembly code which is then fed into the assembler.
-
Binary Utilities – A set of binary utilities such as the assembler and the linker.
-
C Standard Library – The C language is the gateway to the kernel which provides an API defined in POSIX.
-
GNU Debugger (GDB) - Allows to peer inside the program while it is executing to fix bugs.
I will be using the Crosstool-NG to build a custom toolchain as it provides a sleek menu-driven configuration window and it allows you to see the toolchain being built from scratch as well as providing meaningful error messages. It would have been easier to use a build system such as Yocto or Buildroot as those tools encapsulate all the complexity and also generates a toolchain as part of the build though the issue with build systems is if you don’t have a basic understanding of what’s going on under the hood then prepare for a steep learning.
Dependencies
sudo apt-get install python3-dev python2.7-dev libncurses5-dev automake libsdl1.2-dev bison chrpath git g++ gawk texinfo libtool-bin flex gperf lbexpat1-dev
Download & Install
Clone the source code from crosstool-NG’s GitHub repo:
emmet@homepc:/home/emmet/Documents$ git clone https://github.com/crosstool-ng/crosstool-ng
emmet@homepc:/home/emmet/Documents$ cd crosstool-ng-1.24.0/
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ ./bootstrap
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ ./configure --enable-local
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ make
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ make install
Note on some of the commands:
Configure: Responsible for getting everything ready prior to the build such as checking dependencies and other programs that are required to build the software. It produces a custom Makefile specific to your machine from a template thats included in the tarball Makefile.in
Make: This will run a series of tasks defined in the Makefile that will build the software from its source code.
Make install: This will copy the built program with its libraries and documentation into the correct location.
Choosing the toolchain
Crosstool-NG comes with a list of sample toolchains:
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ ./ct-ng help
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ ./ct-ng list-samples
Status Sample name
[L...] aarch64-rpi3-linux-gnu
[L..X] aarch64-unknown-linux-android
[L...] aarch64-unknown-linux-gnu
[L...] aarch64-unknown-linux-uclibc
[L...] alphaev56-unknown-linux-gnu
[L...] alphaev67-unknown-linux-gnu
[L...] arc-arc700-linux-uclibc
[L...] arc-multilib-elf32
[L...] arc-multilib-linux-uclibc
[L...] arm-bare_newlib_cortex_m3_nommu-eabi
[L...] arm-cortex_a15-linux-gnueabihf
[L..X] arm-cortexa5-linux-uclibcgnueabihf
[L...] arm-cortex_a8-linux-gnueabi
[L...] armv7-rpi2-linux-gnueabihf
[L...] armv8-rpi3-linux-gnueabihf
[L...] avr
[L...] i586-geode-linux-uclibc
[L...] i686-centos6-linux-gnu
[L...] i686-centos7-linux-gnu
[L...] i686-nptl-linux-gnu
[L...] i686-ubuntu12.04-linux-gnu
[L...] i686-ubuntu14.04-linux-gnu
[L...] i686-ubuntu16.04-linux-gnu
[L..X] i686-w64-mingw32
[L...] m68k-unknown-elf
[L...] x86_64-ubuntu16.04-linux-gnu
[L...] x86_64-unknown-linux-gnu
[L...] x86_64-unknown-linux-uclibc
[L..X] x86_64-w64-mingw32
[L..X] xtensa-fsf-elf
[L...] xtensa-fsf-linux-uclibc
L (Local) : sample was found in current directory
G (Global) : sample was installed with crosstool-NG
X (EXPERIMENTAL): sample may use EXPERIMENTAL features
B (BROKEN) : sample is currently broken
O (OBSOLETE) : sample needs to be upgraded
Select and configure the toolchain:
emmet@homepc:/home/emmet/Downloads/crosstool-ng-1.24.0$ ./ct-ng arm-cortex_a8-linux-gnueabi
emmet@homepc:/home/emmet/Downloads/crosstool-ng-1.24.0$ ./ct-ng menuconfig
Paths and misc options --->
(${HOME}/x-tools/${CT_TARGET}) Prefix directory
[ ] Render toolchain read only (make sure its unchecked)
(4) Number of parallel jobs
Target options --->
Floating point: (hardware FPU))
(neon) Use specific FPU
# The ARM Cortex-A8 has two coprocessors for floating point operations: neon and vfpv3 which can be found on the technical manual.
Operating System --->
Version of linux (5.5.5) --->
C-library --->
(--enable-obsolete-rpc) extra config
# required to build the depreciated Sun RPC headers
Save and then Exit.
Check the configuration:
emmet@homepc:/home/emmet/Documents/crosstool-ng$ ./ct-ng show-arm-cortex_a8-linux-gnueabi
[L...] arm-cortex_a8-linux-gnueabi
Languages : C,C++
OS : linux-5.5.5
Binutils : binutils-2.34
Compiler : gcc-9.2.0
C library : glibc-2.31
Debug tools : duma-2_5_15 gdb-9.1 ltrace-0.7.3 strace-5.5
Companion libs : expat-2.2.9 gettext-0.20.1 gmp-6.2.0 isl-0.22 libelf-0.8.13 libiconv-1.16 mpc-1.1.0 mpfr-4.0.2 ncurses-6.2 zlib-1.2.11
Companion tools :
Now the toolchain can be built. The build time will depend on your host specs but it took my Ubuntu 18 VM with 4GB RAM and 2 cores to build it in 40 minutes. Once the build is complete, you will have your sparkling new toolchain in the prefix directory you set.
emmet@homepc:/home/emmet/Documents/crosstool-ng-1.24.0$ ./ct-ng build
Add the toolchain to your PATH and test:
emmet@homepc:/home/emmet/Documents$ PATH=~/x-tools/arm-cortex_a8-linux-gnueabihf/bin/:$PATH
emmet@homepc:/home/emmet/Documents/u-boot$ arm-cortex_a8-linux-gnueabihf-gcc --version
arm-cortex_a8-linux-gnueabihf-gcc (crosstool-NG 1.24.0) 8.3.0
Copyright (C) 2018 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
2. Bootloader: U-Boot
Das Universal Bootloader (shortened to U-Boot) is an open source bootloader primarily used for embedded devices to define the firmware instructions on how to boot the device’s operating system as well as supporting a wide range of architectures.
Prerequisites
- Using a USB to TTY converter cable to communicate with the board via serial port and for debugging.
- Check if you have the drivers installed, if not then just do a quick search online of these dependencies and install:
- modinfo usbserial
- modinfo cp210x
- Connect pins to the serial debug on the beaglebone board:
- USB Tx (Green)→ BB Rx
- USB Rx (Blue) → BB Tx
- USB GND (Yellow)→ BB GND
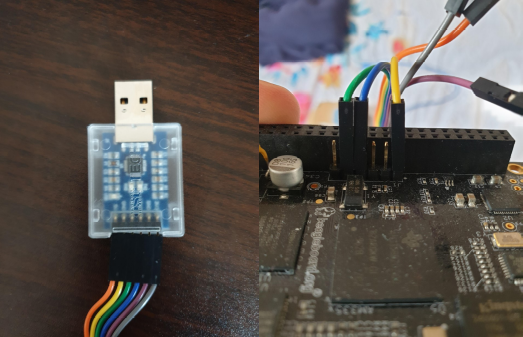
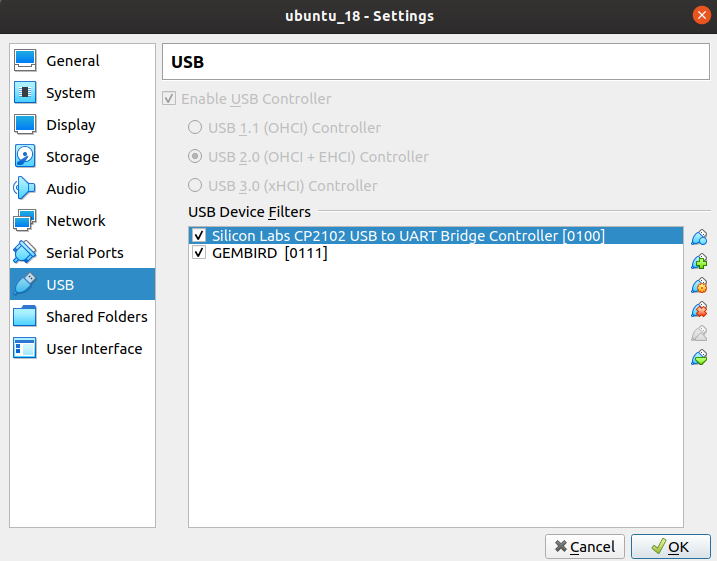
- Power on the board and add the USB device filter to the virtual machine using the “+” symbol.
- Install picocom to communicate with the beaglebone:
sudo apt-get install picocom - Connect to the beaglebone board:
sudo picocom -b 115200 /dev/ttyUSB0
Download and Configure U-Boot
emmet@homepc:/home/emmet/Documents$ git clone https://github.com/u-boot/u-boot
emmet@homepc:/home/emmet/Documents$ cd u-boot
emmet@homepc:/home/emmet/Documents/u-boot$ git checkout v2020.04
emmet@homepc:/home/emmet/Documents/u-boot$ git checkout -b u-boot-bb
U-boot configuration is based on the Beaglebone Black’s processor i.e.AM335X Arm Cortex A8. Lots of configuration files for various boards can be found in the /configs directory.
emmet@homepc:/home/emmet/Documents/u-boot$ make CROSS_COMPILE=arm-cortex_a8-linux-gnueabihf- am335x_evm_defconfig
emmet@homepc:/home/emmet/Documents/u-boot$ make menuconfig
#Modifications
(10) delay in seconds before automatically booting (The amount of time we have to interrupt before its boot up)
Command line interface ---> (emmets_uboot=> ) Shell prompt
Boot media ---> [*] Support for booting from SD/EMMC
#Disable falcon mode (CONFIG_SPL_OS_BOOT)
SPL / TPL ---> [ ] Activate Falcon Mode
Compile U-Boot
emmet@homepc:/home/emmet/Documents/u-boot$ make CROSS_COMPILE=arm-cortex_a8-linux-gnueabihf-
Once the build finishes, it will generate your secondary program loader (SPL) being the MLO file and the third program loader (TPL) files being the U-boot files. SPL is required to be loaded into SRAM from either flash memory, SD card or eMMC as its used as an intermediate stager to initialize main DRAM memory and then load U-Boot since SRAM can’t run a full bootloader due to memory constraints. We will be loading MLO and U-Boot from a 8GB SD card so its necessary to partition the SD card into two sections. Partition one which will hold our boot files while partition two will hold the root filesystem. I used a tool known as GParted for partitioning.
| Name | Size | Format | Flags | |
|---|---|---|---|---|
| Partition 1 | boot | 2GB | FAT32 | boot, LBA |
| Partition 2 | rootfs | 6GB | ext4 |
Copy SPL and TPL files onto the boot partition, unmount device and insert SD card into board. Hold down the boot button before powering on the board otherwise the Beaglebone will boot from onboard eMMC storage.
emmet@homepc:/home/emmet/Documents/u-boot$ cp MLO u-boot.img /media/emmet/BOOT
emmet@homepc:/home/emmet/Documents/u-boot$ sync
emmet@homepc:/home/emmet/Documents/u-boot$ sudo umount /media/emmet/BOOT
emmet@homepc:/home/emmet/Documents/u-boot$ sudo umount /media/emmet/root
emmet@homepc:~$ sudo picocom -b 115200 /dev/ttyUSB0
U-Boot SPL 2020.04 (Jun 15 2020 - 15:29:01 +0100)
Trying to boot from MMC1
U-Boot 2020.04 (Jun 15 2020 - 15:29:01 +0100)
CPU : AM335X-GP rev 2.1
Model: TI AM335x BeagleBone Black
DRAM: 512 MiB
WDT: Started with servicing (60s timeout)
NAND: 0 MiB
MMC: OMAP SD/MMC: 0, OMAP SD/MMC: 1
Loading Environment from FAT... *** Warning - bad CRC, using default environment
<ethaddr> not set. Validating first E-fuse MAC
Net: eth0: ethernet@4a100000
Warning: usb_ether MAC addresses dont match:
Address in ROM is de:ad:be:ef:00:01
Address in environment is 0c:ae:7d:0c:4f:f4
, eth1: usb_ether
Hit any key to stop autoboot: 0
emmets_uboot=>
3. Linux Kernel
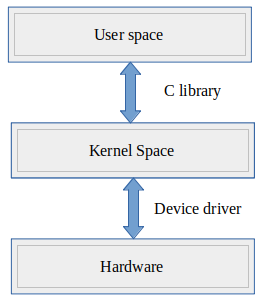
The Linux kernel is the core component of the operating system that is responsible for providing an interface to the user space via the C library, interfacing with the hardware using device drivers and lastly, managing resources such as memory, storage and the execution of tasks.
Download the source code
The Linux Kernel main branch is managed by its creator, Linus Torvalds and you can download the source code from GitHub:
emmet@homepc:/home/emmet/Documents$ git clone https://git.kernel.org/pub/scm/linux/kernel/git/stable/linux.git/
emmet@homepc:/home/emmet/Documents$ cd linux/
emmet@homepc:/home/emmet/Documents/linux$ git checkout v5.5.5
emmet@homepc:/home/emmet/Documents/linux$ git checkout -b kernel-bb-5.5.5 # creates a local branch
You can find all the different kernel configuration files based on the architecture in linux/arch/<architecture>/configs. The Beaglebone Black is based on the ARM V7 architecture so the configuration we are going to use is: multi_v7_defconfig. Clean the project before starting:
emmet@homepc:/home/emmet/Documents/linux$ make distclean
Configure and Build the kernel
Select the ARM V7 kernel configuration file and launch the menuconfig window. In the case of building the kernel, the architecture has to be expressed in addition to CROSS_COMPILE and the various types of architectures that can be supplied can be seen in the arch directory.
emmet@homepc:/home/emmet/Documents/linux$ make ARCH=arm CROSS_COMPILE=arm-cortex_a8-linux-gnueabihf- multi_v7_defconfig
emmet@homepc:/home/emmet/Documents/linux$ make ARCH=arm menuconfig
#Modifications
General setup ---> (-emmetfriel) Local version - append to kernel release
General setup ---> ((beaglebone-ef)) Default hostname
Build and compile the kernel:
emmet@homepc:/home/emmet/Documents/linux$ make ARCH=arm CROSS_COMPILE=arm-cortex_a8-linux-gnueabihf-
Check your new kernel release:
emmet@homepc:/home/emmet/Documents/linux$ make kernelrelease
5.5.5-emmetfriel
The output files are in the arch/arm/boot/ directory. Copy the kernel image (zImage) and the device tree blob arch/arm/boot/dts/am335x-boneblack.dtb onto the boot partition of the SD card.
emmet@homepc:/home/emmet/Documents/linux/arch/arm/boot$ cp zImage /media/emmet/BOOT
emmet@homepc:/home/emmet/Documents/linux/arch/arm/boot$ cp dts/am335x-boneblack.dtb /media/emmet/BOOT
emmet@homepc:/home/emmet/Documents/linux/arch/arm/boot$ sync
Predefining boot parameters using uEnv.txt
U-Boot supports using uEnv.txt which is a text file that declares and initializes boot variables before U-Boot runs bootcmd. Create a file uEnv.txt, insert the contents below and copy it onto the boot partition:
console=ttyS0,115200
ethaddr=02:f8:7e:a6:fc:e1
ipaddr=192.168.1.1
serverip=192.168.1.10
bootfile=zImage
fdtfile=am335x-boneblack.dtb
loadaddr=0x80007fc0
fdtaddr=0x80F80000
loadfdt=fatload mmc 0:1 ${fdtaddr} ${fdtfile}
loaduimage=fatload mmc 0:1 ${loadaddr} ${bootfile}
mmc_args=setenv bootargs console=${console} ${optargs} root=/dev/mmcblk0p2 rootfstype=ext4
fdtboot=run mmc_args; bootz ${loadaddr} - ${fdtaddr}
uenvcmd=mmc rescan; run loaduimage; run loadfdt; run fdtboot;
Insert SD card back into the beaglebone and test the kernel:
[ 2.348290] EXT4-fs (mmcblk0p2): mounted filesystem with ordered data mode. Opts: (null)
[ 2.356659] VFS: Mounted root (ext4 filesystem) readonly on device 179:2.
[ 2.364781] devtmpfs: error mounting -2
[ 2.370319] Freeing unused kernel memory: 1024K
[ 2.375558] Run /sbin/init as init process
[ 2.379760] Run /etc/init as init process
[ 2.383803] Run /bin/init as init process
[ 2.387893] Run /bin/sh as init process
[ 2.391757] Kernel panic - not syncing: No working init found. Try passing init= option to kernel. See Linux Documentation/admin-guide/init.rst for guidance.
[ 2.405995] CPU: 0 PID: 1 Comm: swapper/0 Not tainted 5.5.5-emmetfriel #1
[ 2.412809] Hardware name: Generic AM33XX (Flattened Device Tree)
[ 2.418969] [<c03124e0>] (unwind_backtrace) from [<c030c6dc>] (show_stack+0x10/0x14)
[ 2.426758] [<c030c6dc>] (show_stack) from [<c0daa3e8>] (dump_stack+0xbc/0xd0)
[ 2.434027] [<c0daa3e8>] (dump_stack) from [<c0338e60>] (panic+0x110/0x328)
[ 2.441026] [<c0338e60>] (panic) from [<c0dc1f50>] (kernel_init+0x108/0x110)
[ 2.448109] [<c0dc1f50>] (kernel_init) from [<c03010e8>] (ret_from_fork+0x14/0x2c)
[ 2.455709] Exception stack(0xdb0b1fb0 to 0xdb0b1ff8)
[ 2.460782] 1fa0: 00000000 00000000 00000000 00000000
[ 2.468997] 1fc0: 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
[ 2.477208] 1fe0: 00000000 00000000 00000000 00000000 00000013 00000000
[ 2.483868] ---[ end Kernel panic - not syncing: No working init found. Try passing init= option to kernel. See Linux Documentation/admin-guide/init.rst for guidance. ]---
The kernel should hang or panic which is expected as there is no root filesystem on the SD card. The root filesystem will now be built using Buildroot.
4. Root Filesystem: Buildroot
Buildroot is an embedded Linux build system that supports many processors and architectures with the ability to generate a toolchain, root filesystem, Linux kernel and a bootloader. Since we have built our own toolchain, bootloader and kernel, Buildroot will be used to a create a minimal root filesystem that will include busybox and simple packages.
Clone and Configure Buildroot
git clone git://git.buildroot.net/buildroot
make beaglebone_defconfig
make menuconfig
Modifications:
- Configure buildroot to use our own toolchain instead of the built-in toolchain
Toolchain ---> Toolchain (Custom toolchain) ---> (/home/emmet/x-tools/arm-cortex_a8-linux-gnueabihf) Toolchain path External toolchain gcc version (9.x) --→ External toolchain kernel headers series (5.5.x) ---> - Personalizing the OS
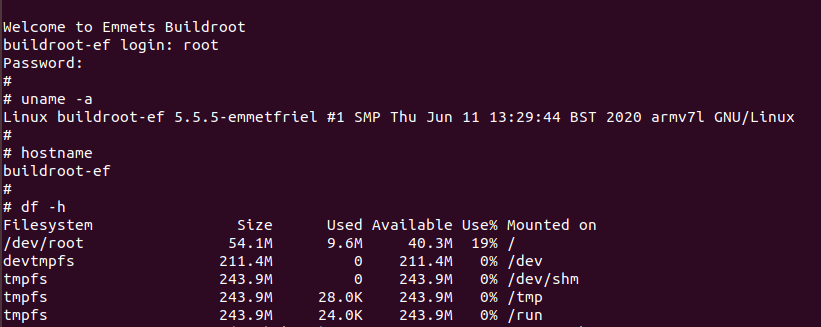
System configuration ---> (buildroot-ef) System hostname (Welcome to Emmets Buildroot) System banner [*] Enable root login with password (password123) Root password - Disable kernel since we built our own
Kernel ---> [ ] Linux Kernel - Enable several packages
Networking applications ---> [*] dhcpcd [*] openssh Text editors and viewers ---> [*] nano [*] optimize for size
Build the root filesystem
emmet@homepc:/home/emmet/Documents/buildroot$ make
Error: If the build throws up an error then copy the relevant files illustrated in the error message into buildroot/output/images/ directory. If the directory doesn’t exist then create it. The build files will be in the output/images/ directory so the next stage is to flash partition 2 of the SD card with the root filesystem. Check where your block device resides before flashing as you may destroy your disk:
emmet@homepc:/home/emmet/Documents/buildroot$ sudo fdisk -l
Device Boot Start End Sectors Size Id Type
/dev/sdb1 * 2048 2086911 2084864 1018M c W95 FAT32 (LBA)
/dev/sdb2 2086912 15564799 13477888 6.4G 83 Linux
emmet@homepc:/home/emmet/Documents/buildroot$ sudo dd if=output/images/rootfs.ext4 of=/dev/sdb2
Booting up the custom Linux OS
Unmount, eject and place the SD card into the Beaglebone Black. The serial console will now show the operating system booting up a lightweight custom embedded Linux distribution.
Additional Resources
If you are interested in pursuing further work into Embedded Linux Design I suggest the following books as a great reference:
Written on May 16th, 2020 by Emmet Friel